The SBLINK project - winner of the 2021 "Researchers Call" from the Department of Mechanics - has as its primary objective to develop a prototype of an intelligent low-back exoskeleton inspired by the bone structure of the human lumbar region.
The first part of the project was centered on the study of the kinematics of the typical movements of lifting and/or moving loads. After Ethical Committee approval, a questionnaire was delivered to workers from different sectors (e.g., healthcare sector, office workers, etc.) from which the most critical movements in terms of spinal overload were identified. Functional tests were conducted in the laboratory of movement analysis to study the kinematics and dynamics of target movements.
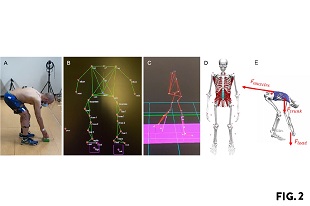
In Figure 1, note the positioning of the reference points (markers) placed on relevant position on the person, which were detected by cameras placed on the walls of the movement analysis laboratory. The images acquired by the cameras were tracked to trace the three-dimensional position of the markers in the space which, together with the data of the force platforms integrated into the floor, made it possible to reconstruct the kinematics and dynamics of the target movements. Electrodes for the acquisition of electromyographic signals were placed on muscle groups of interest to allow the detection of relevant muscles contractions. These acquisitions, associated with the use of musculoskeletal simulation software, made it possible to obtain the load conditions transmitted at the lumbar level and model them (Figura 2 - A) Kinematics and dynamics acquisition of target movements at the Villa Beretta LAB. B) Model of three-dimensional position of the markers. C) Integration of kinematics and dynamics acquisitions. D) Introduction of the acquired data in Opensim musculoskeletal simulation software. E) Calculation of the load conditions transmitted at the lumbar level).
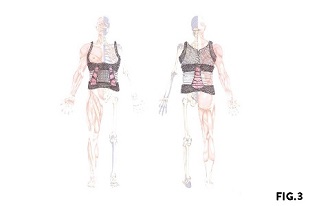
Based on the estimation of the forces transmitted on the lumbar area derived from movement analysis and from relevant literature, the SBLINK project started the second phase, namely the development of a new concept of exoskeleton integrating the skills and technologies of the researchers involved in the project. Figure 3 shows the concept around which SBLINK began to take shape. The exoskeleton is structured in two parts. The front part is characterized by two rows of SBLINK basic elements that help the operator during the flexion phase. The back part is activated in an upright position, contributing to the partialization of the load and to maintain the position when the operator has manually lifted a load or simply if s/he has to keep the upright position for a long time (e.g., doctors during a surgery).
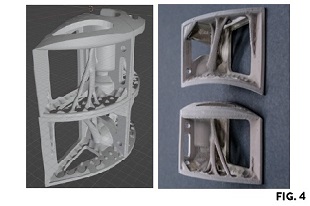
The basic elements of the SBLINK exoskeleton have been designed in metallic material to satisfy the different functional and dimensional requirements. From this point of view, the elements can be parameterized, that is they can be produced based on operator anthropometry or loads to be managed, etc. The elements and the junction between them allow the rotation of the chest in an upright position in order to guarantee freedom of non-assisted movements. During the project, topological optimization techniques were used to lighten the structure while ensuring the appropriate stiffness and strength (Figure 4 - esign of SBLINK parts/assembly and first prototype).
The first components were manifactured by 3D printing in 316L stainless steel, whose characteristics are well suited for biomedical applications in interaction with biological tissues. The technology used is Desktop Metal's BMD (R) available at the Department of Mechanics. In this process, printing is based on the extrusion of metal feedstock: the components are printed using a mixture of polymer loaded with the metal material that is extruded to give shape to the 3D component (Figure 5 - The technology used to manufacture the first SBLINK prototype is Desktop Metal's BMD (R) available at the Department of Mechanics). Subsequently the component is thermally cleaned of the polymer and sintered in an oven at 1360 °C.The project is currently undergoing the next steps - mechanical characterization of the components produced and study of the sensorization of the elements. The possibility, in fact, of equipping the SBLINK exoskeleton with load sensors enables the exploitation of data collection and the exploitation of techniques for processing such data in real-time to make SBLINK "intelligent".
The project involves Marta Gandolla, Luca Patriarca, Paolo Parenti, Niccolò Becattini, Diego Scaccabarozzi and a master's degree student.